Letze Aktualisierung: 19.11.2022
Die Aufgabenstellung ist auch als .PDF verfügbar:
Download Workshop 4 (.pdf, 836 KB)
Inhalte des Workshops
- Programmierkenntnisse
- Vertiefung Variablen
- Verwenden von Text-Bausteinen
- Durchführen von Berechnungen
- Anwenden der bereits erworbenen Kenntnisse
Aufgaben
Aufgabe 1: Entlang der schwarzen Linie
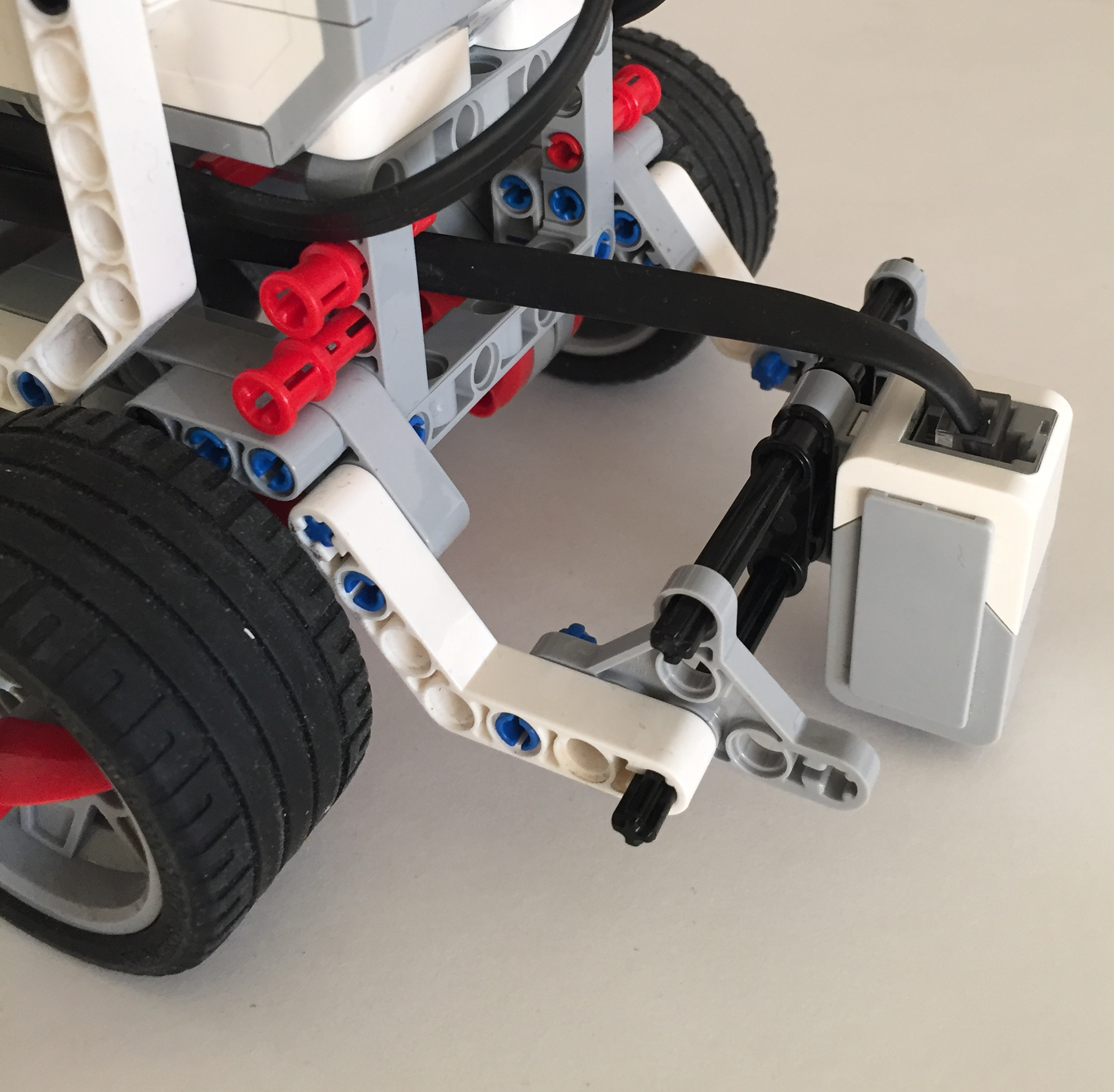
Verwende für diese Aufgabe die Wettbewerbsmatte von 2016 und baue den Farbsensor-Aufsatz so um, dass er nach unten zeigt und mittig vor dem Roboter angebracht ist. Der Sensor soll sich etwa 5-10 mm über dem Boden befinden.
Um einer Linie zu folgen, gibt es verschiedene Methoden. Einige dieser Methoden benötigen zwei Farbsensoren. Die folgende Methode kommt mit einem Farbsensor aus:

Folgende Schritte sind notwendig, damit der Roboter auch bei unterschiedlichen Lichtverhältnissen gut klar kommt:
- Kalibrieren des Farbsensors
- Finden der schwarzen Linie
- Folgen der schwarzen Linie
Aufgabe 1.a: Kalibrieren des Farbsensors
Die Lichtverhältnisse haben einen starken Einfluss auf die Werte der Farbsensoren. Darum ist es wichtig, diese Einflüsse auszugleichen und die Farbsensoren zu „kalibrieren“.
Wenn zwischen einer schwarzen Fläche und eine nicht schwarzen Fläche unterschieden werden soll, dann bietet es sich an den Modus Messen – Stärke des reflektierenden Lichts an.
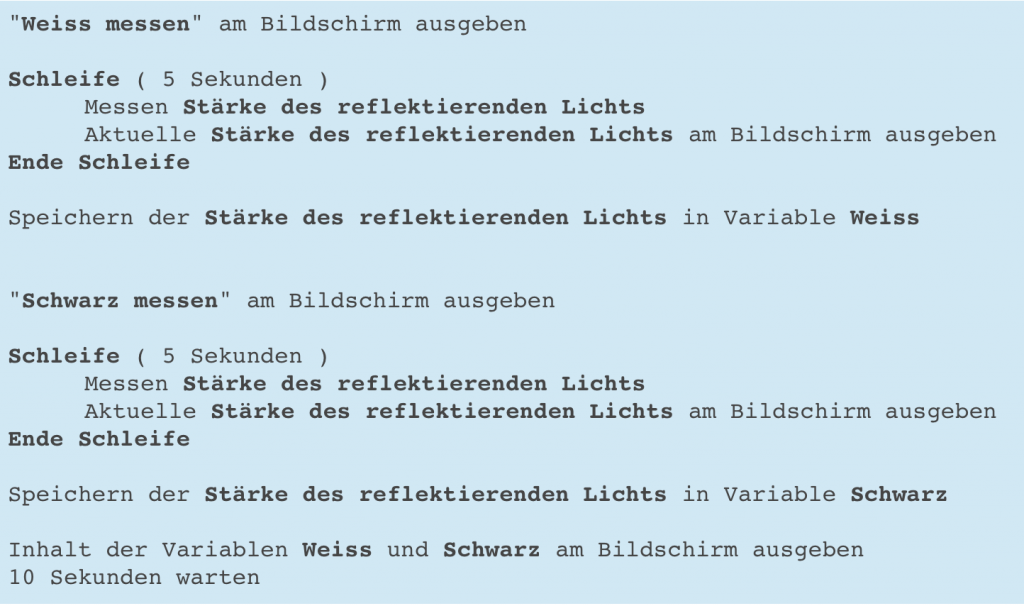
- Zeige die aktuelle Stärke des reflektierenden Lichts laufend am Display an.
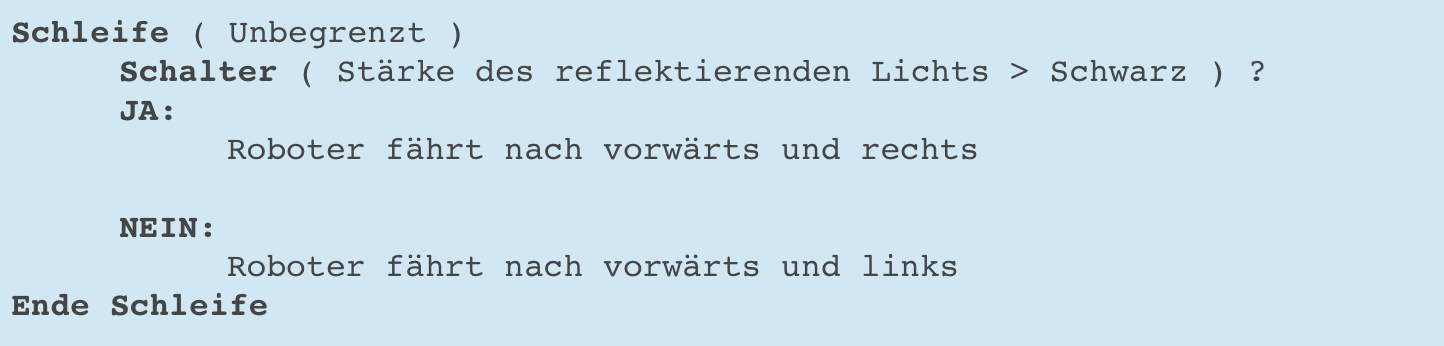
- Der Roboter soll die Anweisungen entsprechend folgendem Pseudo-Quelltext umsetzen:

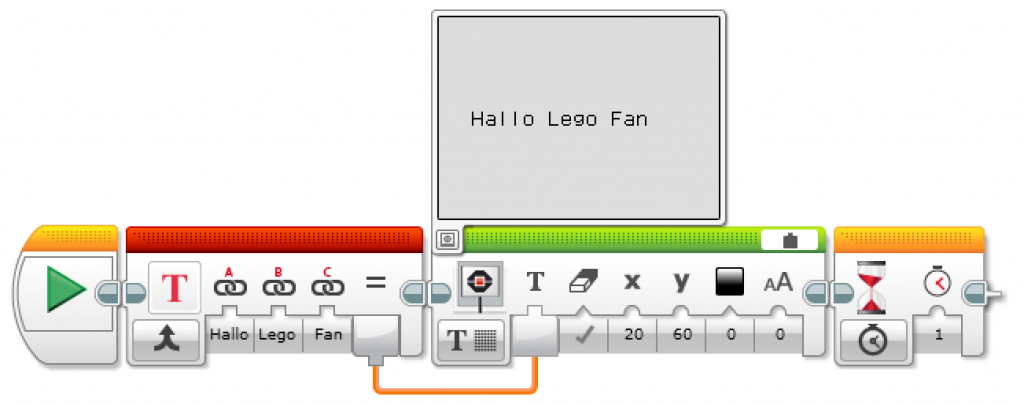
Tipp: Um Texte miteinander zu verbinden kannst du den Baustein Text verwenden:
Aufgabe 1.b: Start – Finde die schwarze Linie
Ausgangsstellung
- Der Roboter soll so positioniert werden, dass er sich mit einem der Räder auf der grünen Startfläche befindet und der Farbsensor darüber hinaus steht. Der Sensor soll sich dabei links von der schwarzen Linie befinden.
- Schreibe in die Variablen Schwarz und Weiss die Werte, die in Aufgabe 1.a ermittelt wurden.
Toleranzen einbauen
Bei der Erkennung der Farben ist es hilfreich eine gewisse Toleranz einzubauen – Wenn der Wert für Schwarz z.B. 10 beträgt, so soll der Roboter bereits ab einem Wert von 15 Schwarz erkennen. Die Toleranz ist die Differenz aus den beiden Werten – in diesem Fall also 5.
- Erstelle eine Variable Toleranz und speichere den Wert 10 darin.
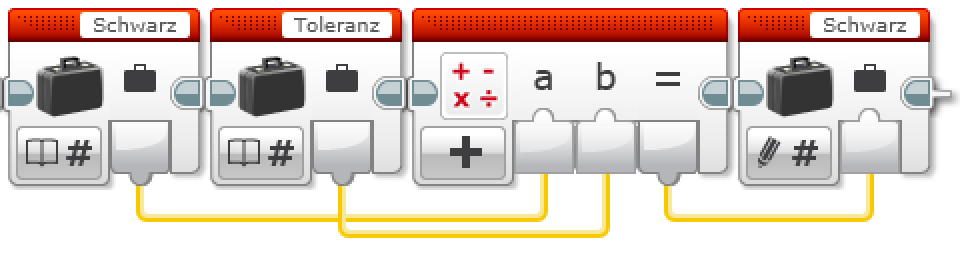
- Addiere zum Variablenwert Schwarz die Toleranz und speichere das Ergebnis wieder in die Variable Schwarz.
- Subtrahiere vom Variablenwert Weiss die Toleranz und speichere das Ergebnis wieder in die Variable Weiss.
Tipp: Um mit Variablen rechnen zu können kannst du den Baustein Mathe verwenden.
Drehen bis Schwarz erkannt wird
- Der Roboter dreht sich solange im Uhrzeigersinn, bis der Sensor eine schwarze Linie erfasst. Anschließend soll der Roboter aufhören sich zu drehen.
- Zusatz Zeige laufend den aktuelle Stärke des reflektierenden Lichts sowie den Inhalt der Variable Schwarz im Display an.
Aufgabe 1.c: Los geht’s – Folge der schwarzen Linie
Nachdem der Roboter die schwarze Linie erkannt hat, soll er nun der Linie folgen.
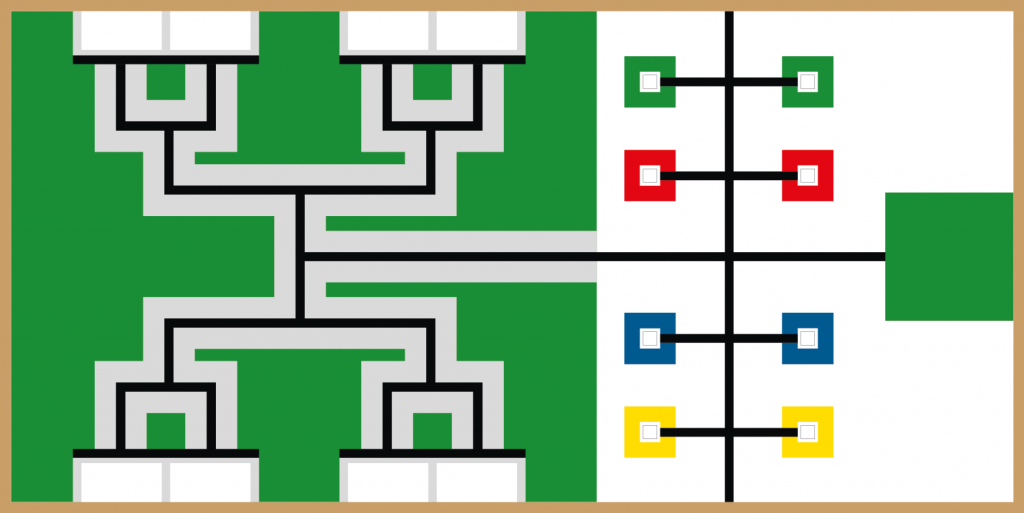
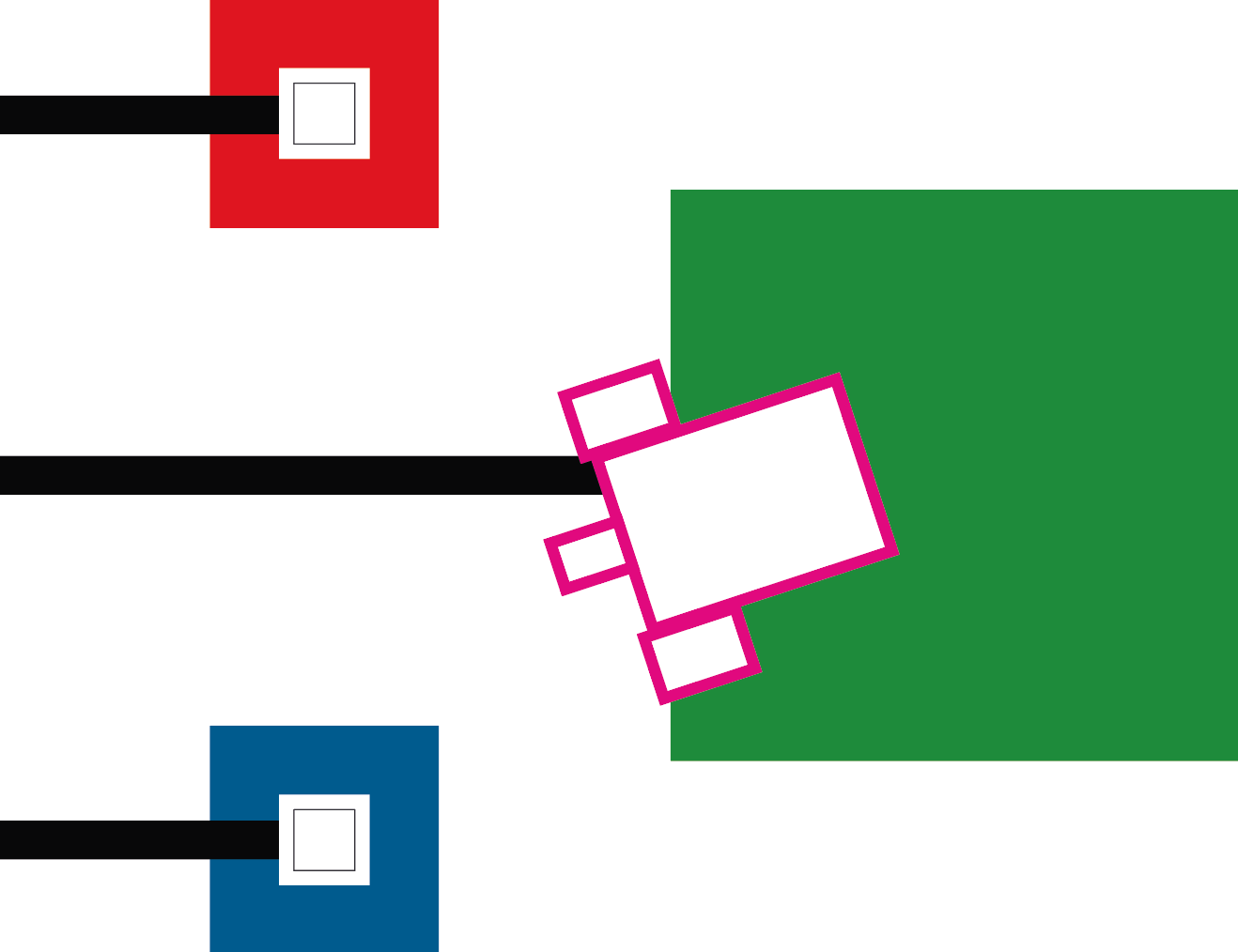
- Der Roboter folgt der Linie entsprechend der folgenden Grafik:
Tipp: Verwende den Modus AN der Hebelsteuerung.
- Zusatz Der Roboter soll der Linie so schnell wie möglich folgen.
- Zusatz Stelle die Werte so ein, dass der Roboter bei der ersten kreuzenden schwarzen Linie gerade aus weiterfährt.
- Zusatz Der Roboter soll möglichst schnell die grüne Fläche am anderen Ende der Matte erreichen.
- Zusatz Folge einer Linie, die mit dem Klebeband auf dem Fussboden aufgeklebt wird.
Aufgabe 2: Explorer (Für die ganz Schnellen)
Ausgangsstellung
- Der Roboter soll so positioniert werden, dass er sich mit einem der Räder auf der grünen Startfläche befindet und der Farbsensor darüber hinaus steht. Der Sensor soll sich dabei links von der schwarzen Linie befinden.
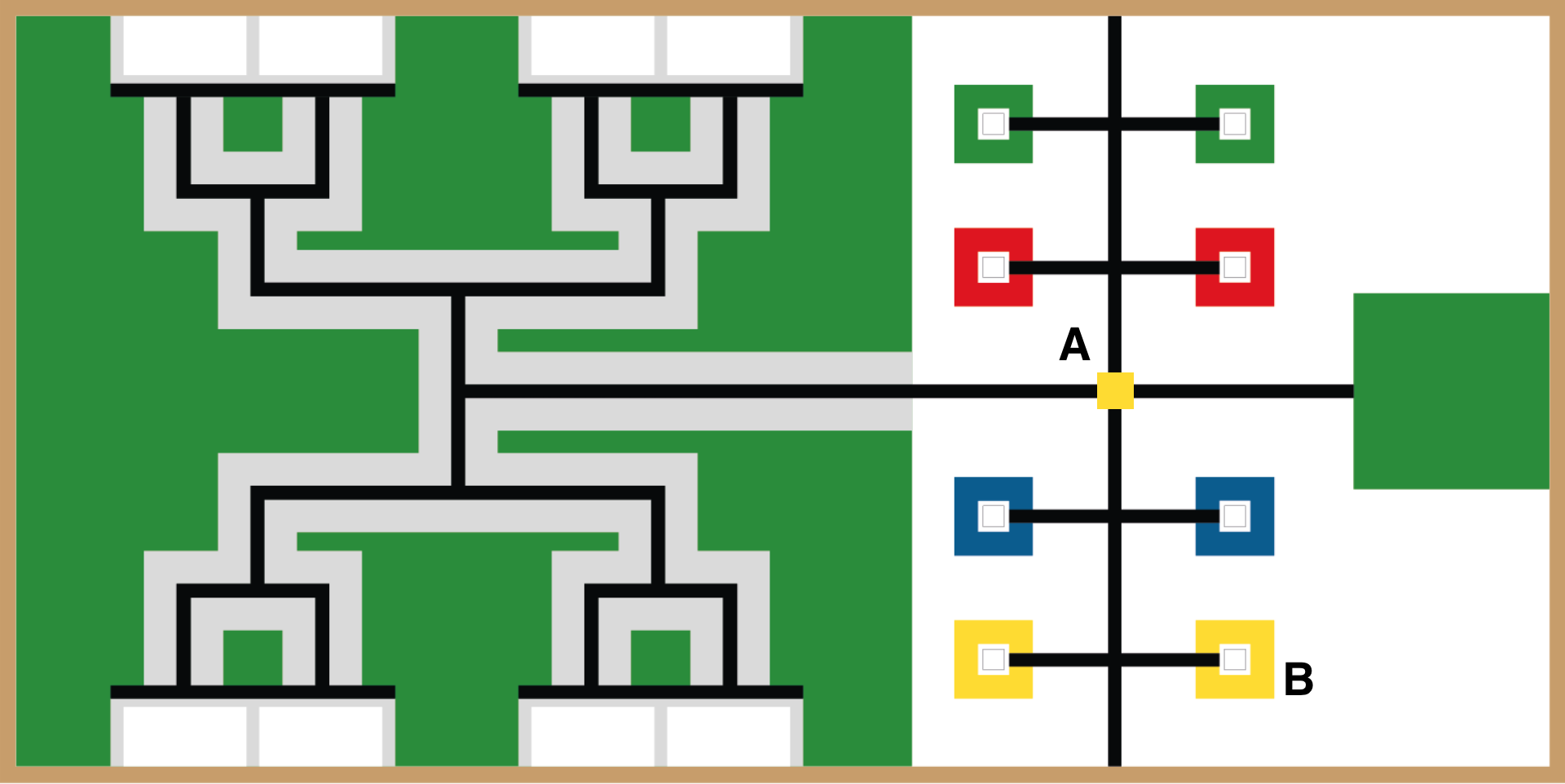
- Auf den ersten Kreuzungspunkt der schwarzen Linien wird ein farbiges Plättchen gelegt (A):
Aufgabe
- Der Roboter fährt der schwarzen Linie entlang, bis er ein farbiges Plättchen erkennt. Anschließend merkt sich der Roboter die Farbe und fährt wieder in den Startbereich zurück, wo er die Farbe des Plättchens auf dem Display ausgibt.
- Zusatz Der Roboter befindet sich bei Beendigung des Laufs vollständig über dem grünen Startbereich.
- Zusatz Der Roboter fährt auf den Zielbereich mit der Farbe, die das Plättchen angibt (B).
Tipp: Für die Ermittlung der Farben muss der Farbsensor auf einen anderen Modus umgeschalten werden.